Touch
for
every
robot.
Force-sensitive sensor tape that gives robots the sense of touch so they can detect force, prevent micro-slips, and handle delicate objects with human-like precision.
What Haptica is
Vision-only robots guess. Tactile robots know. Haptica’s peel-and-stick skin gives any robot high-resolution force sensing in minutes. Unlocking dexterity, safety, and reliability. Our mission is simple: stop drops, stop crushes, and make robots that can finally feel.

1
2
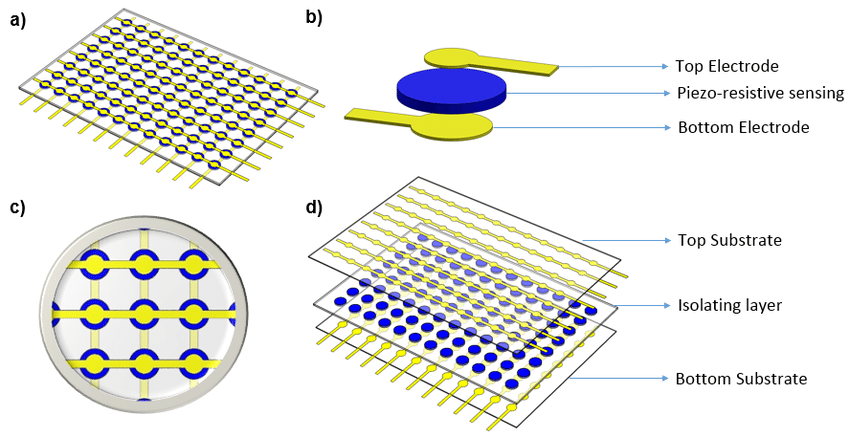
50x50 Taxel Arrays
5-min install • 4 mm taxel pitch • 0.1–1000 N range • SDK: Python/C++
1
2
1M
+
Press Cycles
From the lab to the factory floor
Applications
01
Full Body Feedback
Robots working around people can’t rely on vision alone.
Haptica's instant feedback lets the system stop, slow, or adjust grip in milliseconds, preventing accidents and protecting both humans and equipment.
Haptica's instant feedback lets the system stop, slow, or adjust grip in milliseconds, preventing accidents and protecting both humans and equipment.
02
Delicate Manipulation
Most robots today either crush or drop fragile items because they can’t feel how much force they’re applying.
Haptica’s high-resolution tactile skin gives grippers real-time feedback, making robots safer, more precise, and capable of tasks that were previously impossible without human dexterity.
Haptica’s high-resolution tactile skin gives grippers real-time feedback, making robots safer, more precise, and capable of tasks that were previously impossible without human dexterity.
03
Slip Detection
When an object starts sliding in a robot’s grasp, Haptica senses the change in force distribution across the skin instantly.
That lets the robot tighten or adjust grip before the item falls critical for logistics, food handling, and warehouse automation.
That lets the robot tighten or adjust grip before the item falls critical for logistics, food handling, and warehouse automation.
04
Force-Aware Assembly
Robots often fail at tasks like plugging in connectors, inserting components, or fastening parts because they can’t sense alignment.
With Haptica’s tactile arrays, robots can feel tiny resistance changes during contact and adjust in real time.
With Haptica’s tactile arrays, robots can feel tiny resistance changes during contact and adjust in real time.
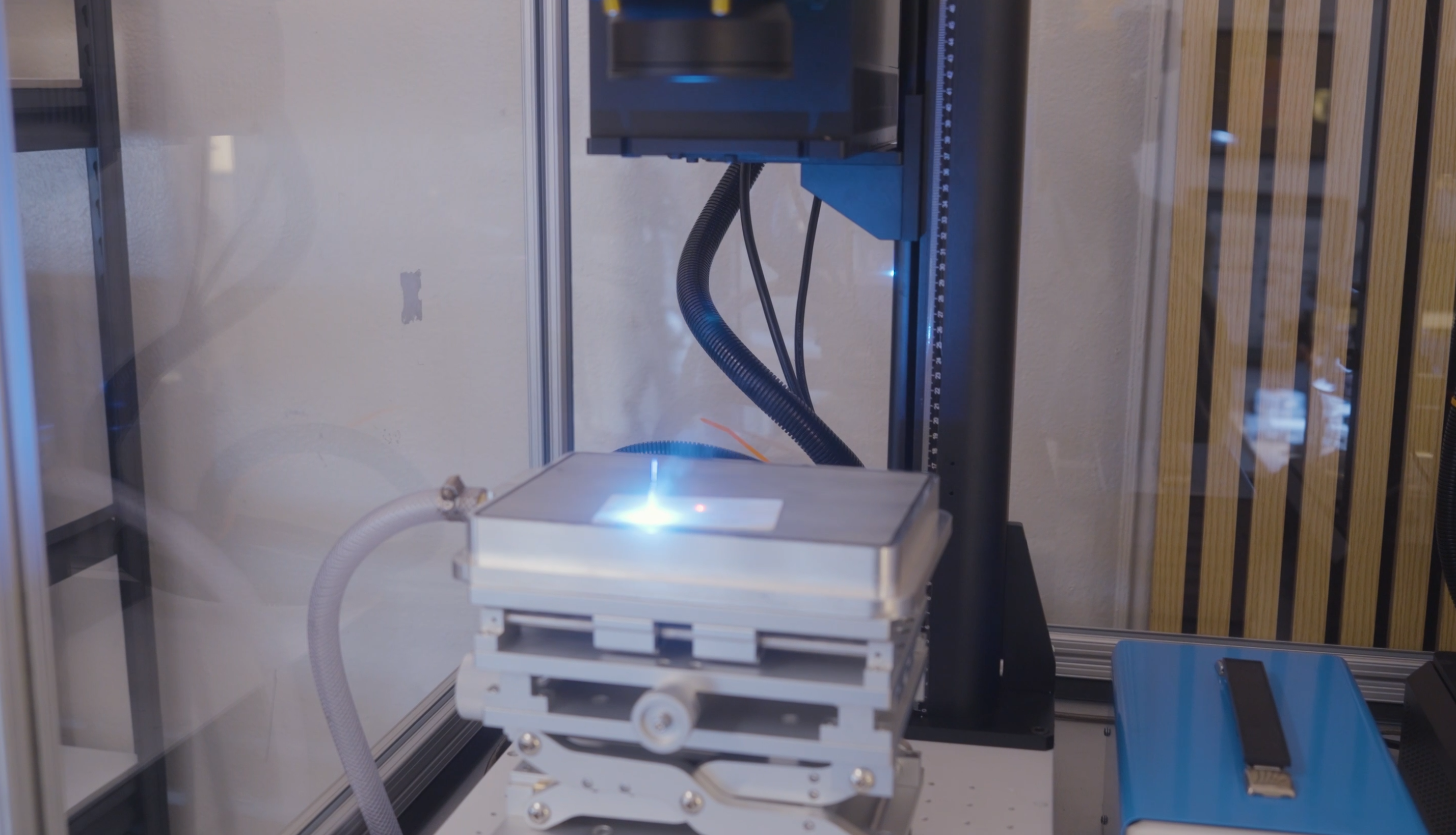
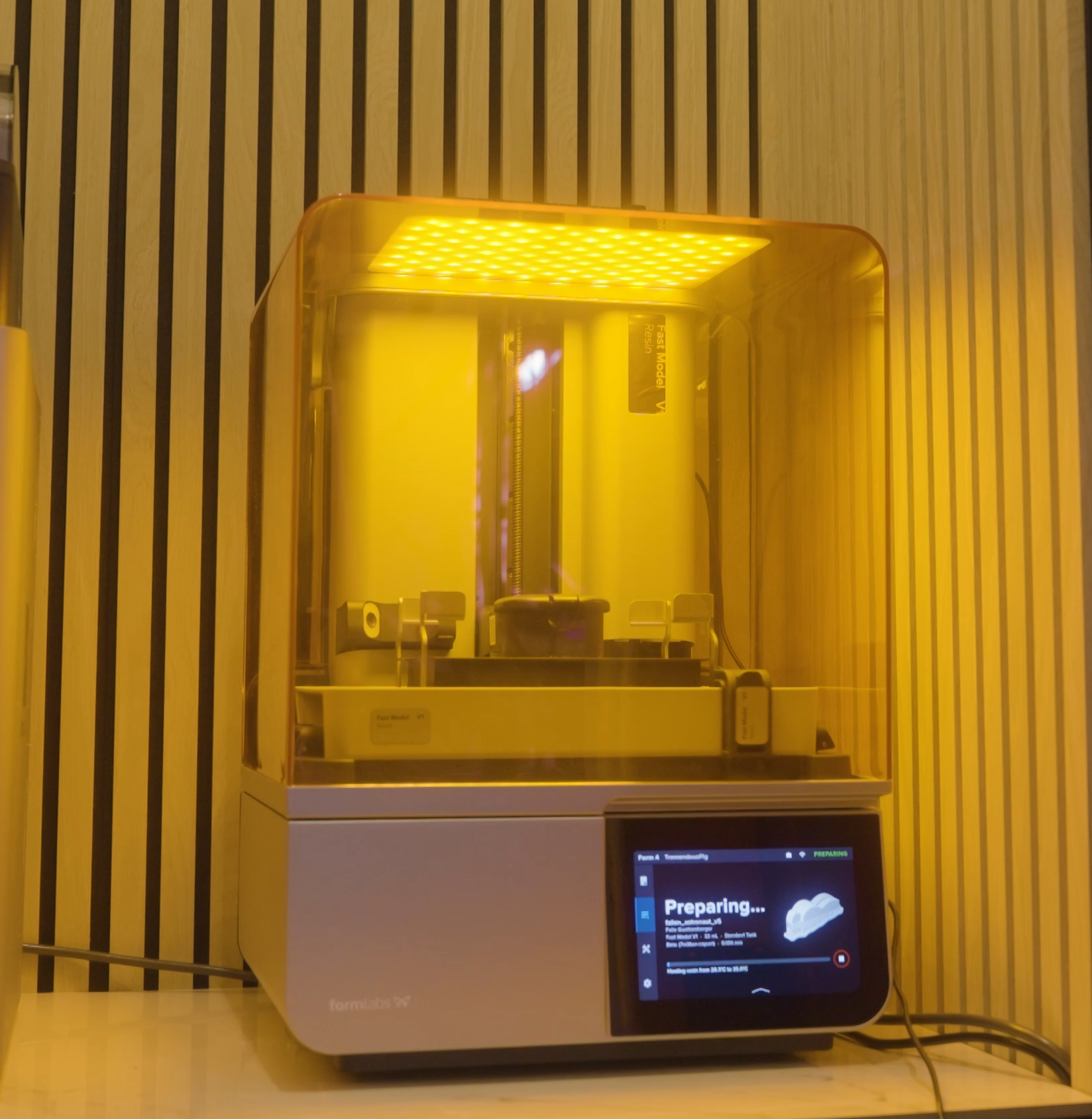
The Lab
Our sensors are fabricated end-to-end in our SF lab: laser lithography, lamination, controller assembly, and calibration. Owning the full stack in-house lets us iterate from CAD to finished sensor array in hours.



[The Team]

.avif)
.avif)
.avif)
.avif)
{founder}
Paul Han
Paul studied Electrical Engineering at Yale and has worked across energy, computing, and robotics, including projects at Meta, Lawrence Livermore, and Intuitive Surgical
Contact:
paul@auremelectro.com
Contact:
paul@auremelectro.com